Целью кинематического анализа является определение угловых скоростей звеньев и передаточных отношений.
Передаточное отношение между звеньями a и b определяется как отношение их угловых скоростей (или частот вращения):
Угловые скорости и частоты вращения связаны соотношениями
 ;
;
 .
.
Очевидно,
что перестановка индексов у величины
 приводит к получению обратной величины,
т.е.
приводит к получению обратной величины,
т.е. .
.
Если
оси вращения звеньев a
и b
параллельны, то передаточному отношению
 и угловым скоростям
и угловым скоростям и
и присваиваются знаки «+» или «-» по
следующим правилам:
присваиваются знаки «+» или «-» по
следующим правилам:
любое из двух возможных направлений вращения принимают за положительное (обычно положительным считают направление вращения входного вала механизма), тогда угловая скорость каждого звена кинематической цепи приобретает вполне определенный знак;
при одинаковом направлении угловых скоростей, входящих в (3.1), они имеют одинаковые знаки и, следовательно, определяют положительное передаточное отношение.
|
|
|
|
|
Рис. 3.1 |
Рис. 3.2 |


 ,
(3.2)
,
(3.2)
а для пары внешнего зацепления (рис. 3.2) -
 .
(3.3)
.
(3.3)
3.1. Кинематика рядовых механизмов
Зубчатый механизм, у которого все звенья вращаются вокруг неподвижных осей, называют рядовым . Такой механизм может быть одноступенчатым (рис. 3.1 и 3.2) и многоступенчатым (рис. 3.3 и 3.4).
В многоступенчатом рядовом механизме число ступеней совпадает с числом зацеплений, его общее передаточное отношение определяют как произведение передаточных отношений всех последовательно соединенных ступеней.
|
|
|
|
|
Рис. 3.3 |
Рис. 3.4 |


Так,
для трехступенчатого механизма по рис.
3.3 общее передаточное отношение
 определится по формуле
определится по формуле
На
рис. 3.4 также представлен трехступенчатый
механизм, у которого колеса
 образуют соосную кинематическую цепь,
причем колесо
образуют соосную кинематическую цепь,
причем колесо участвует одновременно в двух зацеплениях
– в одном как ведомое, в другом как
ведущее (такие колеса называютсвязанными
);
для этого механизма
участвует одновременно в двух зацеплениях
– в одном как ведомое, в другом как
ведущее (такие колеса называютсвязанными
);
для этого механизма
Отметим,
что при
 (выходной валB
вращается
медленнее входного вала A
)
механизм называют редуктором
,
а при
(выходной валB
вращается
медленнее входного вала A
)
механизм называют редуктором
,
а при
 –мультипликатором
.
–мультипликатором
.
3.2. Кинематика планетарных и дифференциальных механизмов
Планетарные и дифференциальные механизмы включают в себя колеса, оси которых являются подвижными. Рычаг, на котором расположены эти оси, называют водилом , а колеса с подвижными осями – сателлитами . Неподвижная ось вращения водила является центральной осью механизма. Колеса, которые вращаются или могут вращаться относительно центральной оси и при этом зацепляются с сателлитами, называют центральными или солнечными.
В планетарную ступень входят: водило; сателлиты, размещенные на этом водиле; колеса, которые зацепляются с этими сателлитами.
|
|
|
Рис. 3.5 |

 и сателлита
и сателлита .
.Колесо
 и водилоH
вращаются относительно центральной
оси механизма.
и водилоH
вращаются относительно центральной
оси механизма.
Сателлит
 совершает сложное движение, состоящее
из двух вращательных: вокруг своей
геометрической оси и одновременно,
вместе с водилом, вокруг центральной
оси механизма.
совершает сложное движение, состоящее
из двух вращательных: вокруг своей
геометрической оси и одновременно,
вместе с водилом, вокруг центральной
оси механизма.
У этого механизма две степени свободы
поэтому его называют дифференциальным механизмом , или дифференциалом . Кинематику такого механизма можно описать формулой
 ;
(3.4)
;
(3.4)
здесь
 –
абсолютные угловые скорости соответствующих
звеньев (величины алгебраические –
положительные или отрицательные),
–
абсолютные угловые скорости соответствующих
звеньев (величины алгебраические –
положительные или отрицательные), – передаточное отношениеобращенного
механизма
(т.е.
такого воображаемого рядового механизма,
который получают из заданного планетарного
мысленной остановкой водила).
– передаточное отношениеобращенного
механизма
(т.е.
такого воображаемого рядового механизма,
который получают из заданного планетарного
мысленной остановкой водила).
Из (3.4) видно, что для кинематической определимости этого механизма из трех угловых скоростей две должны быть заданы, т.е. механизм действительно является дифференциалом.
Общий вид формулы (3.4), пригодный для описания кинематики практически любого планетарного механизма, имеет вид
 ;
(3.5)
;
(3.5)
ее
называют формулой Р. Виллиса. Здесь a
и b
– любые два колеса одной
и той же
планетарной
ступени,
 – передаточное отношение отa
к b
в обращенном (рядовом) механизме, это
отношение всегда выражается через
числа зубьев колес.
– передаточное отношение отa
к b
в обращенном (рядовом) механизме, это
отношение всегда выражается через
числа зубьев колес.
Величины
угловых скоростей
 и
и могут быть любыми; в частности, при
могут быть любыми; в частности, при (т.е. колесо b
неподвижно)
отношение
(т.е. колесо b
неподвижно)
отношение
 ,
и тогда формула Р. Виллиса приобретает
вид
,
и тогда формула Р. Виллиса приобретает
вид
 .
(3. 6)
.
(3. 6)
Формула (3.5) более универсальна и пригодна для любого планетарного механизма, тогда как (3.6) можно применять только для таких планетарных ступеней, у которых имеются неподвижные колеса (рис. 3.6 – 3.8).
|
|
|
|
|
Рис. 3.6 |
Рис. 3.7 |
Рис. 3.8 |



На рис. 3.6 показана схема редуктора Джемса с двухвенцовым сателлитом . Для него
 ,
(3. 7)
,
(3. 7)
передаточное отношение обращенной ступени
 ;
(3. 8)
;
(3. 8)
сопоставляя (3.7) и (3.8), найдем передаточное отношение редуктора
 .
(3. 9)
.
(3. 9)
Таким же способом найдем передаточное отношение редуктора Джемса с одновенцовым сателлитом (рис. 3.7):
 ,
(3.10)
,
(3.10)
 ;
(3.11)
;
(3.11)
 .
(3. 12)
.
(3. 12)
Для
редуктора Давида
(рис. 3.8), также имеющего неподвижное
колесо в составе ступени, входным звеном
является водило H
,
что отличает эту схему от двух других
при выводе формулы для
 :
:
 ;
(3.13)
;
(3.13)
 ;
(3. 14)
;
(3. 14)
 .
(3.
15)
.
(3.
15)
В этих примерах показано применение формулы Виллиса в виде (3.6), хотя было бы вполне корректным и допустимым использование ее в виде (3.5).
Все схемы по рис. 3.6 – 3.8 имеют в своем составе три центральных звена – два центральных колеса и водило; каждое из этих звеньев нагружено вращающим моментом либо от источника движения, либо от потребителя мощности (ведомого звена), либо моментом от стойки. Такие звенья называют основными и в соответствии с их видом и количеством (в данном случае – два колеса и водило) подобным схемам присвоено обозначение типа 2 KH .
|
|
|
Рис. 3.9 |

 ,
, ,
, и водилоH
.
Однако водило в этой схеме не является
основным звеном, так как оно не может
быть нагружено никаким внешним вращающим
моментом, поэтому данный механизм
отнесен к типу 3
K
(т.е. символ H
в обозначение типа механизма не входит).
и водилоH
.
Однако водило в этой схеме не является
основным звеном, так как оно не может
быть нагружено никаким внешним вращающим
моментом, поэтому данный механизм
отнесен к типу 3
K
(т.е. символ H
в обозначение типа механизма не входит).Найдем
передаточное отношение
 этого механизма:
этого механизма:
 .
(3.16)
.
(3.16)
Обращенный механизм для данной схемы представляет собой разветвляющуюся рядовую кинематическую цепь, каждой из двух ее ветвей соответствует свое передаточное отношение:
 ;
;
 .
(3.17)
.
(3.17)
После очевидных подстановок получаем
 .
(3.18)
.
(3.18)
Расчёты в данном разделе будем выполнять в соответствии с методикой, изложенной в , на основании следующих исходных данных:
Z 2 =57 - число зубьев второго колеса
Z 3 =58 - число зубьев третьего зубчатого колеса
Z 4 =20 - число зубьев четвёртого зубчатого колеса
Z 5 =95 - число зубьев пятого зубчатого колеса
Z 6 =22 - число зубьев шестого зубчатого колеса
щ 1 =2с -1 - угловая скорость первого зубчатого колеса
Рассмотрим устройство данного зубчатого механизма.
Определим количество ступеней в механизме и дадим их характеристику. Пятое и шестое колесо образуют простейший ряд ступень - плоский зубчатый механизм с внутренним зацеплением. Вторая ступень, состоящая из 1,2,3,4 зубчатого колеса и рычага H - водила, является планетарным рядом с двухрядным сателлитом с двумя внешними зацеплениями.
Цель кинематического анализа.
Целью кинематического анализа является определение передаточных отношений каждой ступени и всего механизма в целом, а так же угловых скоростей отдельных указанных звеньев.
Определим число зубьев Z 1 .
Определим недостающее число зубьев планетарного механизма Z 1 . Для этого используем условие соосности центральных звеньев. Укажем межосевое расстояние между центральной осью и осью вращения сателлитов.
a=R 1 +R 2 - условие соосности центрального звена.
Z 1 =Z 3 +Z 4 -Z 2
Z 1 =58+20-57=21
Изобразим схему зубчатого механизма в масштабе.
µ z =95/95=1 1/мм
Определим размеры отрезком с помощью которых зубчатые колёса будут изображаться на колесе.
L Z5 =Z k /µ z =95/1=95мм
Кинематический анализ зубчатого механизма графическим способом.
Для выполнения анализа по данному способу необходимо выполнить кинематическую схему механизма. Кинематический анализ начинаем со входного звена.
V A =щ 1 *R A =21м/с
V В =щ 1 *R В =58м/с
Выберем масштаб построения плана линейных скоростей зубчатого механизма.
µ V =V A /(AO)=21/21=1(м/с)/мм
Для входного звена строим план линейных скоростей. Для построения плана достаточно знать скорости двух точек, так как зависимость линейная. Проецируем на полюсную линию точки, скорости которых известны. От проекции точек откладываем перпендикулярно полюсные линии в масштабе векторы линейных скоростей указанных точек. Переходим к входному звену, следующим за входным. На втором звене находим две точки, скорости которых известны. Проецируем эти точки на полюсную линию. Для найденных точек откладываем известные векторы линейных скоростей. По двум известным точкам строим план линейных скоростей. На основании построенного плана линейных скоростей изобразим диаграмму угловых скоростей звеньев. Через точку Р проводим прямые линии параллельные законам распределения линейных скоростей на плане линейных скоростей. Отрезки на лучевой диаграмме с началом в точке О и с концом в точке соответствующего номера изображают угловые скорости звеньев, так как угловая скорость входного звена известна, то можно определить масштабный коэффициент построения диаграммы.
µ щ =щ 1 /О 1 =2/1=2
Зная угловые скорости звеньев, определим передаточные отношения каждой ступени механизма и всего механизма в целом.
Кинематический анализ зубчатого механизма аналитическим способом.
Так как механизм состоит из двух ступеней, то его общее передаточное отношение можно определить как произведение передаточных отношений всех его ступеней. Вначале определим передаточное отношение простейшей зубчатой ступени.
i 56 =Z 6 /Z 5 =22/95=0,23
Рассмотрим планетарный ряд. Сложность кинематического анализа планетарного механизма состоит в том, что сателлиты совершают сложные движения и поэтому имеют угловую скорость переносного движения и относительную угловую относительно водила. Для возможности решения задачи используют принцип остановки водило. На принципе остановки водило основан метод Виллиса, суть которого заключается в следующем. Планетарный механизм мысленно заменяется обращенным механизмом.
Обобщенный механизм строится следующим образом:
1) водило считается неподвижным,
2) так как водило неподвижно, то из угловых скоростей всех звеньев вычитается угловая скорость водило,
3) для каждого зацепления можно записать формулу передаточного отношения через число зубьев,
4) с помощью математических преобразований от обращенного механизма можно перейти к планетарному механизму - исходному, и определить передаточные отношения уже для планетарного механизма.
Составим таблицу. Таблица будет содержать три колонки: 1) номер деталей, из которых состоит планетарный механизм, 2) угловые скорости звеньев в обычном движении, 3) угловые скорости звена при остановленном водило.
i 12 =(щ 2 -щ H)/(щ 1 -щ H)=-2,7
i 34 =(щ 2 -щ H)/(-щ H)=-0,34
щ 2 =щ 3 =3,06
щ 1 H =2-2,28=-0,28
щ 2 H =3,06-2,28=0,78
щ 3 H =3,06-2,28=0,78
щ 4 H =0-2,28=-2,28
Определим общее передаточное отношение всего механизма
Общие понятия и определения. Планетарным называется зубчатый механизм, у которого помимо центральных колес, вращающихся на неподвижных осях, имеется хотя бы одно звено с подвижными осями. На последние посажены шестерни, зацепляющиеся с центральными колесами и обкатывающиеся вокруг них. Таким образом, особенность планетарного механизма состоит в наличии одной или нескольких подвижных осей, совершающих круговые движения вокруг неподвижной центральной оси.
Колеса, сидящие на подвижных осях, называются сателлитами и обозначаются буквами g или /, а звено, носящее на своих осях сателлиты, называется водилом и обозначается буквой Я.
Простым планетарным называется механизм, у которого одно из центральных колес неподвижно (остановлено). Примеры простых планетарных механизмов показаны на рис. 11.18. При вращении водила движение сателлитов напоминает движение планет. Вращаясь вокруг своих осей, закреп-
Рис. 11.18.
а - с внешним зацеплением солнечного колеса с сателлитом; б - с внутренним зацеплением коронного колеса с сателлитом.
ленных на водиле, они вместе с водилом вращаются вокруг основной неподвижной оси.
Так как оси центральных колес и водила лежат на одной прямой, то любой планетарный механизм является соосным. Остановленное центральное колесо внешнего зацепления называется солнечным, а остановленное центральное колесо с внутренним зацеплением (см. рис. 11.18, б ) часто называют коронным.
Схема одноступенчатого планетарного механизма состоит из четырех подвижных звеньев: центрального колеса а с числом зубцов z v сателлита g с числом зубцов z 2 , водила Н и центрального колеса b внутреннего зацепления с числом зубцов z 3 . Степень подвижности этого механизма, подсчитанная по формуле П. Л. Чебышева
Известно, что полная определенность движения ведомых звеньев механизма возможна лишь в том случае, когда число ведущих звеньев совпадает с числом степеней свободы. Поэтому у рассматриваемого механизма, обладающего двумя степенями свободы, должно быть два ведущих звена.
Планетарный механизм с двумя и больше степенями свободы называется дифференциальным. Такой механизм позволяет суммировать на ведомом звене движения, получаемые от двух или более независимых ведущих звеньев.
Дифференциальный механизм может быть обращен в простой планетарный или же в замкнутый планетарный путем остановки (закрепления) одного из центральных колес или же наложением на механизм дополнительной кинематической связи, в результате которой степень подвижности механизма становится равной единице.
Так, если в рассматриваемом механизме (рис. 11.19, б) закрепить центральное колесо Ь, то получим простой планетарный механизм с одной степенью подвижности. Здесь ведущими и ведомыми звеньями могут быть aw Н или Я и а.
На рис. 11.20 показаны две схемы замкнутого планетарного механизма - одноступенчатого и двухступенчатого. Способ их замыкания в данном случае одинаковый. Он состоит в том, что центральное колесо b жестко скреплено с шестерней с, а на оси водила Я закреплена шестерня d. Шестерни с и d введены в зацепление с шестернями z 5 и z (. или z (. и z 7 , которые вращаются на отдельно вынесенных и неподвижных осях 0 56 или O fi7 .

Рис. 11.19.
а - все подвижные звенья свободны - дифференциальный механизм; б - закреплено центральное коронное колесо - планетарный механизм

Рис. 11.20.
Все многообразие планетарных передач, как плоских, так и пространственных (конических), можно привести к нескольким основным типам, классифицируя их либо по видам зацепления (А - внешнее,/ - внутреннее), либо по числу основных звеньев. Наибольшее применение в промышленности получили цилиндрические одно- и двухступенчатые передачи, классифицируемые как передачи 2K-# и ЗК.
В передачах 2К-Я(рис. 11.21) основными звеньями являются два центральных колеса а и b и водило Я (отсюда и обозначение 2К-Я). На рис. 11.21 показаны возможные варианты двухступенчатых передач, у которых центральные колеса сцепляются с двухвенцовым сателлитом d и /. Они могут быть классифицированы также по видам зацеплений как //-передачи,.//-передачи и ЛЛ-передачи. На основе передач 2К-Я образуются почти все используемые в машиностроении замкнутые планетарные передачи.
В передачах ЗК (рис. 11.22) основными звеньями являются три колеса а> b и е> а водило Я служит только для установки осей сателлитов и не несет нагрузки от внешних моментов.

Рис. 11.21.
а - //-передача; б - ЛЛ-передача; в -//-передача

Рис. 11.22.
а - остановлено колесо Ь; б - остановлено колесо е
 Всеволод большое гнездо как правитель
Всеволод большое гнездо как правитель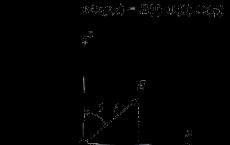 Как заполняются электронные уровни, подуровни и орбитали по мере усложнения атома
Как заполняются электронные уровни, подуровни и орбитали по мере усложнения атома Самые первые спички в мире
Самые первые спички в мире