Изобретение относится к машиностроению и может быть использовано в качестве винтового устройства для преобразования вращательного движения в поступательное. Устройство состоит из винта (1), корпуса (2) с крышками (3), резьбовых роликов (9), зацепляющихся с резьбой винта (1). Резьбовые ролики (9) зафиксированы от осевого смещения относительно корпуса за счет установленных в сепараторах (11) шаров (12), упирающихся в крышки (3) корпуса посредством сферического поднутрения (Г), выполненного на торцах каждого резьбового ролика, и кольцевого паза (В), выполненного на внутренней торцовой поверхности каждой крышки. Упругие кольца (10) имеют возможность поворота в пазах (Е) резьбовых роликов (9) относительно оси винта. Для обеспечения сборки устройства ширина L П паза «Е» резьбовых роликов была больше ширины L К колец минимум на 1,5...2 шага резьбы винта. Возможны два исполнения устройства, в одном из которых резьбовые ролики дополнительно связаны с корпусом зубчатыми зацеплениями, а в другом не связаны. Благоприятная кинематика в местах контакта шара с крышкой и роликом, а также возможность перекатывания колец по пазам «Е» резьбовых роликов обеспечивают высокий КПД, малую интенсивность износа и высокую долговечность. 1 з.п. ф-лы, 3 ил.
Изобретение относится к машиностроению и может быть использовано в качестве механической винтовой передачи для преобразования вращательного движения в поступательное.
Известна планетарная роликовинтовая передача (см. Решетов Д.Н. «Детали машин», учебник для студентов машиностроительных и механических специальностей вузов, 4-е издание, М.: Машиностроение, 1989 год, стр.314), состоящая из винта, гайки и установленных между ними резьбовых роликов. Ролики своими торцовыми шейками установлены в сепараторах. Чтобы исключить самопроизвольное вывинчивание роликов, они дополнительно связаны по торцам с гайкой зубчатыми зацеплениями. Витки роликов находятся в резьбовых зацеплениях с витками винта и гайки. При этом на винте выполняют наружную многозаходную резьбу, а на гайке - внутреннюю многозаходную резьбу.
Основным недостатком данной планетарной роликовинтовой передачи является технологическая сложность изготовления на внутренней поверхности гайки, закаленной до высокой твердости, высокоточной многозаходной резьбы (как правило, пяти или шестизаходной). В основном по этой причине освоение производства планетарных роликовинтовых передач, которые по большинству эксплуатационных параметров превосходят другие передачи для преобразования вращательного движения в поступательное, затруднено. В мире изготовление планетарных роликовинтовых передач освоили только несколько фирм.
При этом резьбовая гайка рассматриваемой планетарной роликовинтовой передачи выполняет следующие функции:
Воспринимает осевую силу с исполнительного механизма и передает ее через ролики на винт;
Удерживает ролики от перемещения в радиальном направлении от оси винта к гайке;
Участвует в преобразовании вращательного движения в поступательное.
Из известных технических решений наиболее близким по технической сущности к заявляемому устройству является устройство для преобразования вращательного движения в поступательное (см. Козырев В.В. Конструкции роликовинтовых передач и методика их проектирования: учеб. пособие / Владимир. гос. ун-т. - Владимир: Редакционно-издательский комплекс ВлГУ, 2004. с.8-9, рис.1.7), которое выбрано в качестве прототипа. Данное устройство состоит из винта, корпуса с крышками, который совершает поступательное движение, резьбовых роликов, которые установлены в корпусе с возможностью поворота вокруг собственных осей, двух колец с внутренними коническими фасками и подшипников, установленных между кольцами и крышками. На каждом резьбовом ролике нарезана резьба, витки которой находятся в зацеплении с витками винта, а на торцах выполнены конические фаски, которые взаимодействуют с внутренними коническими фасками колец. Корпус устройства не имеет внутреннюю многозаходную резьбу и внутренних зубчатых венцов, а резьбовые ролики - наружных зубчатых венцов. В каждом подшипнике тела качения установлены в сепараторе.
При работе устройства винт вращается, резьбовые ролики вращаются только вокруг собственных осей (нет вращательного движения осей резьбового ролика вокруг оси винта), а корпус движется поступательно вдоль оси винта. Рабочая осевая сила произвольного направления передается с винта на резьбовые ролики за счет зацепления витков резьбы этих деталей, с резьбовых роликов на соответствующую втулку за счет контакта конических фасок резьбовых роликов и втулки, а с втулки на соответствующую крышку через соответствующий подшипник.
Данное устройство имеет следующие недостатки:
Шейка резьбового ролика - отверстие в крышке образуют подшипник скольжения с низким КПД и высокой интенсивностью износа;
При вращении резьбового ролика между его коническими фасками и сопрягаемыми фасками колец возникает трение скольжение из-за разных по величине радиусов точек контакта;
Из-за малой площади контакта между сопрягаемыми коническими фасками резьбовых роликов и колец устройство имеет малую контактную прочность, а из-за трения скольжения в указанном сопряжении малую нагрузочную способность и долговечность;
Устройство имеет большие радиальные габариты;
Резьбовые ролики вращаются только вокруг своей оси, что снижает передаточную функцию устройства и диапазон ее изменения.
Задачей изобретения является повышение КПД, нагрузочной способности и долговечности устройства для преобразования вращательного движения в поступательное за счет замены трения скольжения на трение качения в месте сопряжения деталей устройства, а также уменьшение радиальных габаритов и расширение диапазона изменения передаточной функции устройства.
Поставленная задача достигается тем, что устройство снабжено, по меньшей мере, двумя кольцами, на торцовых поверхностях каждого резьбового ролика выполнены поверхности под ключ и сферические поднутрения, центры которых расположены на оси резьбового ролика, а на его цилиндрической резьбовой поверхности - кольцевые пазы, число которых равно количеству колец, причем на внутренней торцовой поверхности каждой крышки выполнен кольцевой паз, профиль которого является дугой окружности, кольца установлены в пазах резьбовых роликов, а число шаров в каждом ряду равно количеству последних, при этом каждый шар в каждом ряду взаимодействует с одной стороны со сферическим поднутрением резьбового ролика на соответствующем торце, с противоположной стороны - с кольцевым пазом соответствующей крышки, а ширина кольцевых пазов на резьбовых роликах больше ширины колец не менее чем на 1,5...2 шага резьбы винта. Возможно исполнение устройства, для которого оно снабжено закрепленными в отверстии корпуса с разных его сторон втулками с внутренними зубчатыми венцами, которые зацепляются с наружными зубчатыми венцами, выполненными на концевых участках каждого резьбового ролика.
Изобретение поясняется прилагаемыми чертежами, где:
На фиг.1 показан общий вид устройства;
На фиг.2 показан разрез А-А на фиг.1 для 1-го исполнения устройства;
На фиг.3 показан разрез А-А на фиг.1 для 2-го исполнения устройства с дополнительными зубчатыми зацеплениями между резьбовыми роликами и втулками корпуса.
Устройство для преобразования вращательного движения в поступательное, см. фиг.1, состоит из винта 1 и узла, совершающего поступательное перемещение с базовыми элементами «Б», которые предназначены для соединения указанного узла с исполнительным механизмом. Указанный узел, см. фиг.2, состоит из корпуса 2 и двух крышек 3, которые соединены с корпусом винтами 4 с пружинными шайбами 5. По меньшей мере, между одной крышкой 3 и корпусом 2 устанавливается набор регулировочных прокладок или компенсатор 6. Возможны и другие исполнения указанного узла, которые обеспечивают сборку и работу устройства.
К наружной торцовой поверхности каждой крышки 3, см. фиг.2, крепится Г-образная втулка 7, которая удерживает с осевым и радиальным зазором маслоотражатель 8, а на внутренней торцовой поверхности крышки выполняется кольцевой паз «В», профиль которого является дугой окружности.
Внутри корпуса, см. фиг.2, установлены резьбовые ролики 9, количество которых обычно из условия соседства выбирают наибольшим для повышения нагрузочной способности устройства (минимальное количество резьбовых роликов равно трем). Витки резьбы роликов 9 зацепляются с витками резьбы винта 1. На торцах каждого резьбового ролика 9, см. фиг.2, выполняют сферические поднутрения «Г», центр которых расположен на оси резьбового ролика, и отверстия «Д» под ключ, а на цилиндрической резьбовой поверхности - пазы «Е», количество которых не менее двух. В пазы «Е» резьбовых роликов 9 устанавливают кольца 10 из пружинной стали, которые с малой силой поджимают резьбовые ролики к винту. При этом ширина L П паза «Е» больше ширины L K кольца 10 на 1,5...2 шага резьбы винта (резьбового ролика) для обеспечения сборки устройства.
Между каждой крышкой 3 и резьбовым роликом 9, см. фиг.2, расположен один ряд установленных в сепараторе 11 шаров 12, число которых равно количеству резьбовых роликов. При этом каждый шар 12 с одной стороны взаимодействует с кольцевым пазом «В» крышки 3, а с противоположной стороны - со сферическим поднутрением «Г» резьбового ролика 9.
В описанном выше устройстве резьбовые ролики имеют две степени свободы: каждый ролик может вращаться вокруг собственной оси; все ролики вместе с сепараторами могут вращаться относительно оси винта. Отсюда устройство может иметь непостоянное осевое перемещение корпуса с роликами и шарами при равномерном вращении винта (переменную передаточную функцию). Устройства для преобразования вращательного движения в поступательное с переменной передаточной функцией можно использовать, например, в запорных механизмах, домкратах и так далее.
Чтобы предлагаемое устройство имело постоянную передаточную функцию, необходима дополнительная связь между резьбовыми роликами и корпусом, например зубчатыми зацеплениями. Эта связь снижает количество степеней свободы резьбовых роликов до единицы. В этом случае, см. рис.3, на концах каждого резьбового ролика 9 выполняют наружные зубчатые венцы «Ж», а в отверстии корпуса 2 закрепляются втулки 13 с внутренними зубчатыми венцами «И».
Рассмотрим, как общий случай, порядок сборки устройства, в котором резьбовые ролики дополнительно связаны с корпусом зубчатыми зацеплениями. На винте обычно выполняют цилиндрическую поверхность «К», которая упрощает сборку, см. рис.3. Правую крышку 3, см. рис.3, с рядом шаров 12 в сепараторе 11 устанавливают на винт с левого его торца. В пазы «Е» резьбовых роликов 9 устанавливают кольца 10, и этот узел с левого торца винта, см. рис.3, вводят на его цилиндрическую поверхность «К». С помощью ключа резьбовые ролики попеременно ввинчивают на винт до тех пор, пока их резьба полностью не окажется в зацеплении с резьбой винта. Далее в приспособлении винт устанавливают вертикально, а под крышку 3 подводят базовый элемент приспособления, обеспечивающий перпендикулярность крышки к оси винта. В кольцевой паз «В» крышки устанавливают шары в сепараторе. Затем с помощью ключа резьбовые ролики попеременно ввинчивают на винт до взаимодействия поднутрения «Г» каждого ролика с соответствующим шаром. Так как при ввинчивании резьбовых роликов на винт они занимают вдоль его оси различные положения необходимо, чтобы ширина L П паза «Е» резьбовых роликов была больше ширины L K колец 10 минимум на 1,5...2 шага резьбы винта. Чтобы зафиксировать положение резьбовых роликов относительно винта и правой крышки, сверху на ролики устанавливают второй ряд шаров с сепаратором и поджимают собранный узел специальной гайкой, которую наворачивают на винт. Затем сверху на указанный узел устанавливают корпус, в котором закреплена левая втулка 13 с внутренним зубчатым венцом, зубья которого вводят в зацепление с наружными зубьями роликом. Винт с собранным узлом без правой крышки и шаров с сепаратором извлекают из приспособления, и вводят правую втулку 13 с внутренним зубчатым венцом в отверстие корпуса и на зубья роликов, а затем закрепляют эту втулку в корпусе, например с помощью цилиндрического штифта. С той же стороны к роликам подводят шары с сепаратором и правую крышку, которую соединяют с корпусом резьбовым соединением. Затем, отвернув специальную гайку, винтами 4 с пружинными шайбами 5 соединяют корпус с левой крышкой через компенсатор или набор регулировочных прокладок. Измерив момент холостого хода, определяют надо ли регулировать устройство с помощью компенсатора или набора регулировочных прокладок.
Устройство для преобразования вращательного движения в поступательное работает следующим образом. Винт 1, см. фиг.3, вращаясь, приводит в движение резьбовые ролики 6, которые совершают планетарное движение, обкатываясь по зубчатым венцам втулок 13. Резьбовые ролики зафиксированы от осевого смещения относительно корпуса за счет шаров, упирающихся в крышки корпуса. Это и является механизмом преобразования вращательного движения винта в поступательное движение корпуса совместно со всеми деталями, установленными в нем. При этом шары 12 будут катиться по кольцевым пазам «Г» крышек и совершать дополнительное верчение относительно оси роликов под действием сил трения. Кольца 10 будут катиться по пазам резьбовых роликов, воспринимая радиальную нагрузку с винта на ролики. Осевая нагрузка будет передаваться с крышки корпуса через шары на резьбовые ролики вдоль их осей.
В заявляемом устройстве рабочая осевая сила передается с крышки корпуса непосредственно через шары на ролики вдоль их осей практически как в упорном подшипнике. В устройстве-прототипе при передаче осевой силы есть дополнительное сопряжение, которое работает с трением скольжения, а также установка резьбовых роликов осуществляется на подшипниках скольжения. Следовательно, заявляемое устройство обеспечивает более высокий КПД, меньший износ контактирующих поверхностей и большую долговечность. Кроме того, резьбовые ролики в заявляемом устройстве совершают планетарное движение, для которого можно получить больший диапазон измерения передаточной функции.
1. Устройство для преобразования вращательного движения в поступательное, содержащее винт, установленные в корпусе, имеющем крышки, с возможностью поворота вокруг собственной оси резьбовые ролики, которые имеют резьбовое зацепление с винтом и с каждой стороны своими торцами упираются в крышку через ряд шаров, установленных в сепараторе, отличающееся тем, что устройство снабжено, по меньшей мере, двумя кольцами, на торцовых поверхностях каждого резьбового ролика выполнены поверхности под ключ и сферические поднутрения, центры которых расположены на оси резьбового ролика, а на его цилиндрической резьбовой поверхности - кольцевые пазы, число которых равно количеству колец, причем на внутренней торцовой поверхности каждой крышки выполнен кольцевой паз, профиль которого является дугой окружности, кольца установлены в пазах резьбовых роликов, а число шаров в каждом ряду равно количеству последних, при этом каждый шар в каждом ряду взаимодействует с одной стороны со сферическим поднутрением резьбового ролика на соответствующем торце, с противоположной стороны - с кольцевым пазом соответствующей крышки, а ширина кольцевых пазов на резьбовых роликах больше ширины колец не менее чем на 1,5...2 шага резьбы винта.
2. Устройство по п.1, отличающееся тем, что оно снабжено закрепленными в отверстии корпуса с разных его сторон втулками с внутренними зубчатыми венцами, которые зацепляются с наружными зубчатыми венцами, выполненными на концевых участках каждого резьбового ролика.
Липецкий колледж транспорта и дорожного хозяйства
Исследовательская работа студентов группы К2-14
Тема: «Исследование работы механизмов для преобразования движения
Липецк
2015/2016 учебный год
Содержание
1.Введение (исторические основы вопроса преобразования движения)
2. Актуальность исследования (прикладной характер гипотезы),
3. Цель исследования
3. Способы и методы исследовательской работы
6. Выводы и предложения
7. Презентация проекта
1. Введение
Механизмы для преобразования движения
Краткий обзор истории развития простых механизмов
Согласно существующей в механике классификации ДПЭ относится к семейству простейших механизмов, веками верой и правдой служившим человеку, таким как колесо, блок, рычаг, ворот.
Все они изначально приводятся в действие мускульной силой человека и практическая их ценность состоит в многократном умножении (усилении) исходного мускульного воздействия. Каждый из этих механизмов прошел длительное испытание практикой и временем и по сути они стали своеобразными "кирпичиками " (элементарными звеньями) из которых построено великое множество разнообразных сложнейших механизмов. Особое место среди этих механизмов занимает, безусловно, колесо; потому что именно с его помощью было осуществлено непрерывное преобразование механической энергии, использующее в качестве источника силу тяжести.
Речь идет конечно же о преобразователе, известном как водяное колесо , впоследствие ставшим гидротурбиной (что увеличило эффективность механизма, оставив прежним принцип действия).
Широчайшее применение данного типа преобразователя объясняется очень просто: его идеальной сопрягаемостью (в простейшем случае - посредством одной общей оси вращения) с важнейшими мельничным жерновом , а позже - электрогенератором .


Интересно также применение водяного колеса в "инверсном (обратном) включении" для подъема воды, используя "входную" мускульную силу человека.

Однако не все же нагрузки имели вращательный характер (например, для
мощных кузнечных мехов
лучше бы подходил преобразователь возвратно-поступательного типа), и тогда приходилось прибегать к промежуточным преобразователям (типа кривошипно-шатунного механизма) , которые вносят свои потери в процесс преобразования и увеличивают сложность и стоимость
системы. Многие примеры необходимости применения промежуточных преобразователей при переходе от вращательного движения к возвратно-поступательному мынаходим в древних рисунках и гравюрах.

На рисунке внизу, например, показано сопряжение вращающегося водяного колеса с поршневым насосом - механической нагрузкой, требующей возвратно-поступательного движения приводного механизма.

Таким образом становиться очевидной полезность и востребованность
для многих практических применений преобразователей энергии возвратно-поступательного типа, приводимых в движение той же силой тяжести.
Наиболее подходящим простым механизмом в этом случае является рычаг.
Рычаг, в полном смысле - усилитель силы. Поэтому он и нашел широчайшее применение при подъеме тяжестей, например, в строительстве (классический пример - строительство пирамид египтянами). Однако, в этом применении
"входным" воздействием служили те же мускульные усилия людей, а режим работы рычага был, конечно же, дискретным.
Есть еще один интересный практический пример применения рычага как преобразователя энергии: это древняя боевая метательная машина - требушет.

Требушет интересен новым принципиальным отличием от классического применения рычага: он приводится в действие уже силой тяжести (а не мускульной силой) падающей массы. Однако признать требушет преобразователем энергии, с возможностью подсоединения полезной нагрузки не представляется возможным. Во первых это механизм единичного (разового) действия, во вторых чтобы его зарядить (поднять груз) требуется все та же мускульная сила (хотя и усиленная с помощью блоков и воротов).
Тем не менее, творческая мысль ищет новые пути в попытках сопряжения рычага с полезной нагрузкой и использования при этом силы тяжести в качестве исходной движущей силы.
Механизмы, преобразующие движение: зубчато-реечный, винтовой, кривошипный, кулисный, кулачковый. Их детали, характеристики и особенности целевого использования в различных отраслях производства и легкой промышленности. Схемы их работы в различных машинах.
Для приведения в действие рабочих органов, а также для преобразования одного вида движения в другой применяют кривошипно-шатунные, кулачковые и другие механизмы.
Кривошипно-шатунный механизм. Такой механизм преобразует вращательное движение в поступательное. В неподвижных подшипниках станины вращается вал с кривошипом, связанный шарниром с одним концом шатуна. Другой конец шатуна при помощи шарнира соединен с ползуном, скользящим в неподвижных прямолинейных направляющих. Если кривошип вращается непрерывно, то ползун совершает возвратно-поступательное движение. В течение одного оборота кривошипа ползун совершает два хода - сначала в одном, а затем в обратном направлении.
Кривошипно-шатунный механизм применяют в паровых машинах, двигателях внутреннего сгорания, поршневых насосах и т. д. Положение кривошипа в верхней точке поступательного хода называют мертвой точкой. Для перехода кривошипом этого положения, когда он является ведущим звеном механизма, предназначен маховик - колесо с тяжелым ободом, насаженное на кривошипный вал. Кинетическая энергия маховика обеспечивает непрерывное движение кривошипно-шатунного механизма.
Кулачковый механизм. Такой механизм преобразует вращательное движение в поступательное в различного рода автоматах, металлорежущих станках и других машинах. Кулачек, вращаясь вокруг оси, сообщает толкателю возвратно-поступательное движение.
Движение толкателя зависит от профиля кулачка. Если профиль кулачка представляет дугу окружности, описанной из центра, то толкатель на этом участке будет неподвижным. Такой кулачковый механизм называют плоским.
Преобразование вращательного движения в прямолинейное
Кулисные механизмы
Кулачковые механизмы
Шарнирно-рычажные механизмы
Кривошипно-шатунные механизмы
Кривошипно-шатунные механизмы служат для преобразования вращательного движения в возвратно-поступательное и наоборот. Основными деталями кривошипно-шатунного механизма являются: кривошипный вал, шатун и ползун, связанные между собой шарнирно (а). Длину хода ползуна можно получить любую, зависит она от длины кривошипа (радиуса). Если длину кривошипа мы обозначим через букву А, а ход ползуна через Б, то можем написать простую формулу: 2А = Б, или А = Б/2. По этой формуле легко найти и длину хода ползуна и длину кривошипа. Например: ход ползуна Б = 50 мм, требуется найти длину кривошипа А. Подставляя в формулу числовую величину, получим: А = 50/2 = 25 мм, то есть длина кривошипа равна 25 мм.

а - принцип действия кривошипно-шатунного механизма,
б - одно-коленчатый вал, в - много-коленчатый вал,
г - механизм с эксцентриком
В кривошипно-шатунном механизме вместо кривошипного вала часто применяют коленчатый вал. От этого сущность действия механизма не меняется. Коленчатый вал может быть как с одним коленом, так и с несколькими (б, в).
Видоизменением кривошипно-шатунного механизма может быть также эксцентриковый механизм (г). У эксцентрикового механизма нет ни кривошипа, ни колен. Вместо них на вал насажен диск. Насажен же он не по центру, а смещено, то есть эксцентрично, отсюда и название этого механизма - эксцентриковый.
В некоторых кривошипно-шатунных механизмах приходится менять и длину хода ползуна. У кривошипного вала это делается обычно так. Вместо цельного выгнутого кривошипа на конец вала насаживается диск (планшайба). Шип (поводок, на что надевается шатун) вставляется в прорез, сделанный по радиусу планшайбы. Перемещая шип по прорезу, то есть удаляя его от центра или приближая к нему, мы меняем размер хода ползуна.
Ход ползуна в кривошипно-шатунных механизмах совершается неравномерно. В местах "мертвого хода" он самый медленный.
Кривошипно-шатунные - механизмы применяются в двигателях, прессах, насосах, во многих сельскохозяйственных и других машинах.
Кулисные механизмы
Возвратно-поступательное движение в кривошипных механизмах можно передавать и без шатуна. В ползунке, которая в данном случае называется кулисой, делается прорез поперек движения кулисы. В этот прорез вставляется палец кривошипа. При вращении вала кривошип, двигаясь влево и вправо, водит за собой и кулису.

а - принудительная кулиса, б - эксцентрик с пружинным роликом,
в - качательная кулиса
Вместо кулисы можно применить стержень, заключенный в направляющую втулку. Для прилегания к диску эксцентрика стержень снабжается нажимной пружиной. Если стержень работает вертикально, его прилегание иногда осуществляется собственным весом.
Для лучшего движения по диску на конце стержня устанавливается ролик.
Кулачковые механизмы
Кулачковые механизмы служат для преобразования вращательного движения (кулачка) в возвратно-поступательное или другой заданный вид движения. Механизм состоит из кулачка - криволинейного диска, насаженного на вал, и стержня, который одним концом опирается на криволинейную поверхность диска. Стержень вставлен в направляющую втулку. Для лучшего прилегания к кулачку, стержень снабжается нажимной пружиной. Чтобы стержень легко скользил по кулачку, на его конце устанавливается ролик.

а - плоский кулачек, б - кулачек с пазом, в - кулачек барабанного типа,
г - серцевидный кулачек, д - простейший кулачек
Но бывают дисковые кулачки другой конструкции. Тогда ролик скользит не по контуру диска, а по криволинейному пазу, вынутому сбоку диска (б). В этом случае нажимной пружины не требуется. Движение ролика со стержнем в сторону осуществляется самим пазом.
Кроме рассмотренных нами плоских кулачков (а), можно встретить кулачки барабанного типа (в). Такие кулачки представляют собой цилиндр с криволинейным пазом по окружности. В пазу установлен ролик со стержнем. Кулачок, вращаясь, водит криволинейным пазом ролик и этим сообщает стержню нужное движение. Цилиндрические кулачки бывают не только с пазом, но и односторонние - с торцовым профилем. В этом случае нажим ролика к профилю кулачка производится пружиной.
В кулачковых механизмах вместо стержня очень часто применяются качающиеся рычаги (в). Такие рычаги позволяют менять длину хода и его направление.
Длину хода стержня или рычага кулачкового механизма можно легко рассчитать. Она будет равна разнице между малым радиусом кулачка и большим. Например, если большой радиус равен 30 мм, а малый 15, то ход будет 30-15 = 15 мм. В механизме с цилиндрическим кулачком длина хода равняется величине смещения паза вдоль оси цилиндра.
Благодаря тому, что кулачковые механизмы дают возможность получить разнообразнейшие движения, их часто применяют во многих машинах. Равномерное возвратно-поступательное движение в машинах достигается одним из характерных кулачков, который носит название сердцевидного. При помощи такого кулачка происходит равномерная намотка челночной катушки у швейной машины.
Шарнирно-рычажные механизмы
Часто в машинах требуется изменить направление движения какой-либо части. Допустим, движение происходит горизонтально, а его надо направить вертикально, вправо, влево или под каким-либо углом. Кроме того, иногда длину хода рабочего рычага нужно увеличить или уменьшить. Во всех этих случаях применяют шарнирно-рычажные механизмы.

На рисунке показан шарнирно-рычажный механизм, связанный с другими механизмами. Рычажный механизм получает качательное движение от кривошипно-шатунного и передает его ползуну. Длину хода при шарнирно-рычажном механизме можно увеличить за счет изменения длины плеча рычага. Чем длиннее плечо, тем больше будет его размах, а следовательно, и подача связанной с ним части, и наоборот, чем меньше плечо, тем короче ход.

2. Актуальность исследования (прикладной характер гипотезы)
Работа с различными механизмами стала сегодня неотъемлемой частью нашей жизни. Мы используем механизмы преобразования движения, не задумываясь, а как они выполнены, почему облегчают нашу жизнедеятельность.
Актуальность темы нашей работы определяется тем, что в настоящее время роль таких механизмов в современной жизни не оценена в полном объеме, в процессе обучения по нашей профессии такие механизмы имеют важное значение.
В современном мире изучение механизмов преобразования движения является важной частью всего курса обучения по профессии «Машинист крана», так как зная основные принципы работы исполнения действующих органов, подъемных механизмов, работы двигателя внутреннего сгорания, преобразования движения в ходовой части автомобиля. Поэтому гипотезой нашего исследования будет следующая версия. При активном изучении работы подобных механизмов активнее происходит выполнение практических работ на различных видах производственных практик. (учебное вождение на автомобиле, учебная практика на автокране)
Многие интересуются и увлекаются изучением, конструированием и моделированием различными механизмами, в том числе и механизмами преобразования движения
Наверное, каждый человек хотя бы один раз в жизни задумывался над тем каким способом облегчить свою жизнь и создать необходимые удобства в обработке материалов, управление транспортом, строительстве
Всегда вызывало у людей множество вопросов проблемы работы подобных механизмов. Исследуя историю вопроса мы пришли к выводу, что подобные механизмы совершенствуются с развитием техники
3. Цель исследования
Цель работы
Цель работы - изучить, какую роль механизмы преобразования движения играют в современной технике
Основная цель работы - ответить на вопрос почему важно подробно изучать механизмыпреобразования движения в процессе овладения профессии «Машинист крана», также хотим доказать, что активное изучение подобных машин и механизмов помогает успешно проходить различные практические работы.
4. Задачи исследовательской работы
Для достижения поставленной цели нам необходимо решить следующие задачи:
Задачи работы:
1.Изучить литературу по теме механизмов преобразования движения
2.Выяснить значение терминов кривошипно-шатунный механизм, кулачковый механизм, шарнирный механизм другие виды механизмов.
3. Найти примеры в технике, жизни бытовое применение, собрать материал для упорядочивания данных, изготовить модель механизмов
4.Провести наблюдение за работой подобных механизмов в практической работе
5.Сравнить полученные результаты
6.Сделать выводы о проделанной работе
5. Практические основы исследовательской работы (модели, проекты, наглядные примеры)
фото
6. Выводы и предложения
Исследование может быть полезно и интересно студентам профессиональных учреждений, которые изучают подобные механизмов,а также всем, кто интересуется техникой.
Своей работой мы хотели привлечь внимание студентов к проблеме изучения механизмов преобразования движения.
В процессе работы над исследованием мы приобрели опыт … Думаю, что полученные мной знания позволят мне избежать ошибок / помогут правильно …
Результаты исследования заставили меня задуматься …
Больше всего сложностей вызвало у меня …
Исследование в корне изменило мое мнение / представление о …
Тема: «Передача вращательного движения».
Большинство современных машин и приборов создается по схеме двигатель – передача – рабочий орган (исполнительный механизм) (рис. 1).
Передача
Двигатель
Рабочий орган машины
Рис. 1
Причины применения передач:
необходимость изменения величины скорости и направления движения.
Необходимость увеличить в несколько раз вращающий момент на ведущих колесах (при трогании с места, на подъемах).
Назначение передач:
выбор оптимальной скорости движения;
регулирование скорости движения (повышение, понижение);
изменение вращающихся моментов и сил движения;
передача мощности на расстояние.
Передача – это механизм, служащий для передачи механической энергии на расстояние с преобразованием скоростей и моментов.
Для передачи вращательного движения используют: фрикционные, решетные, зубчатые, червячные, цепные передачи.
По принципу действия передачи делят на 2 группы:
Передачи, основанные на использовании сил трения между элементами передачи (фрикционные, решетные).
Передачи зацеплением, работающие в результате возникновения давления между зубьями или кулачками на взаимодействующих деталях (зубчатые, червячные, цепные).
Классификация передач:
По характеру изменения скорости передачи бывают понижающие и повышающие.
По конструктивному оформлению передачи бывают открытые (без закрывающего корпуса) и закрытые (общий корпус с герметизацией и смазкой).
По числу ступеней – одноступенчатые и многоступенчатые.
Раздел 3. Механизмы передач и преобразование движения. Разновидности, устройство, назначение.
Тема: «Передачи преобразующие движение».
Существует два вида преобразования движения:
преобразование вращательного движения в поступательное,
преобразование поступательного движения во вращательное.
Для преобразования вращательного движения в поступательное применяют реечную зубчатую передачу и передачу винт-гайка.
Для преобразования поступательного движения во вращательное применяют только реечную зубчатую передачу.
Реечная зубчатая передача
Передача и преобразование вращательного движения в поступательное и наоборот осуществляется цилиндрическим колесом 1 и рейкой 2 (рис. 1).

Рис. 1. Реечная зубчатая передача
Достоинства реечной зубчатой передачи: надежность, компактность, долговечность, небольшие нагрузки на валы и подшипники, постоянство передаточного отношения из-за отсутствия проскальзывания.
Недостатки : высокие требования к точности изготовления, шум при больших скоростях, жесткость. Применяют в широком диапазоне областей и условий работы – от часов и приборов до самых тяжелых машин.
Передачи винт – гайка
Это винтовой механизм, служащий для преобразования вращательного движения в поступательное.
Эти передачи обеспечивают большой выигрыш в силе, возможность получения медленного движения, большую несущую способность при малых габаритах, возможность достижения высокой точности перемещений, простоту конструкции и изготовления – это их достоинства .
Эти передачи нашли широкое применение в различных механизмах: домкратах, винтовых прессах, механизмах перемещения столов, испытательных машинах, измерительных приборах.
Ведущим звеном, совершающим вращательное движение, может быть как винт 1 , так и гайка 2 .
К недостаткам этих механизмов относят: большие потери на трение и малых КПД, повышенная интенсивность и изнашивание резьбы из-за большого трения.
Передачи винт – гайка делятся на передачи скольжения и качения.
Передачи скольжения требуют наличия смазки между винтом и гайкой или гайка может быть выполнена из бронзы.
В передачах качения на винте и гайке выполняют винтовые канавки, которые служат дорожками качения для шариков (рис. 3).


Рис. 2 Передача винт – гайка Рис. 3 Шариковинтовая передача
Отправить свою хорошую работу в базу знаний просто. Используйте форму, расположенную ниже
Студенты, аспиранты, молодые ученые, использующие базу знаний в своей учебе и работе, будут вам очень благодарны.
1. Механизмы для преобразования движения
Механическая энергия многих машин-двигателей обычно представляет собой энергию вращательного вала. Однако не во всех станках и механизмах рабочие органы также совершают вращательное движение. Зачастую им необходимо сообщить поступательное или возвратно-поступательное движения. Возможна и обратная картина. В подобных случаях применяют механизмы, преобразующие движение. К ним относятся: зубчато-реечный, винтовой, кривошипно-шатунный, кулисный и кулачковый механизмы.
1 .1 Зубчато-реечный механизм
Зубчато-реечный механизм состоит из зубчатого цилиндрического колеса и зубчатой рейки - планки с нарезанными на ней зубьями. Такой механизм можно использовать для различных целей: вращая зубчатое колесо на неподвижной оси, перемещать поступательно рейку (например, в реечном домкрате, в механизме подачи сверлильного станка); обкатывая колесо по неподвижной рейке, перемещать ось колеса относительно рейки (например, при осуществлении продольной подачи суппорта в токарном станке).
1 .2 Винтовой механизм
Для преобразования вращательного движения в поступательное очень часто применяется механизм, основными частями которого являются винт и гайка. Такой механизм применяют в различных конструкциях:
гайка (внутренняя резьба нарезана в корпусе) неподвижна, винт вращается и одновременно поступательно перемещается;
гайка неподвижна, винт вращается и одновременно поступательно перемещается с салазками. Салазки шарнирно соединены с винтом и могут совершать возвратно-поступательное движение в зависимости от направления движения винта по направляющим;
винт закреплен так, что может лишь вращаться, а гайка (в данном случае салазки) лишена возможности вращаться, так как ее нижняя (или другая) часть установлена между направляющими. В этом случае гайка (салазки) будет перемещаться поступательно.
В перечисленных винтовых механизмах применяются резьбы. различного профиля, чаще всего прямоугольная и трапецевидная (к примеру в слесарных тисках, домкратах и т. п.). Если угол подъема винтовой линии небольшой, то ведущим движением является вращательное. При очень большом угле подъема винтовой линии возможно преобразование поступательного движения во вращательное и тому примером может служить быстродействующая отвертка.
1 .3 Кривошипный механизм
Крипошип - звено кривошипного механизма, которое может совершать полный оборот вокруг неподвижной оси. Кривошип (I) имеет цилиндрический выступ - шип 1 , ось которого смещена относительно оси вращения кривошипа на расстояние г, которое может быть постоянным или регулируемым. Более сложным вращающимся звеном кривошипного механизма является коленчатый вал. Эксцентрик (III) - диск, насаженный на вал с эксцентриситетом, то есть со смещением оси диска относительно оси вала. Эксцентрик можно рассматривать как конструктивную разновидность кривошипа с малым радиусом.
Кривошипный механизм - механизм, преобразующий один вид движения в другой. Например, равномерно вращательное - в поступательное, качательное, неравномерное вращательное и т. д. Вращающееся звено кривошипного механизма, выполненное в виде кривошипа или коленчатого вала, связано со стойкой и другим звеном вращательными кинематическими парами (шарнирами). Принято различать подобные механизмы на кривошипно-шатунные, кривошипно-коромысловые, кривошипно-кулисные и др. в зависимости от характера движения и наименования того звена, в паре с которым работает кривошип.
Используются кривошипные механизмы в поршневых двигателях, насосах, компрессорах, прессах, в приводе движения металлорежущих станках и других машинах.
Кривошипно-шатунный механизм - один из самых распространенных механизмов преобразования движения. Его применяют как для преобразования вращательного движения в возвратно-поступательное (например, поршневые насосы), так и для преобразования возвратно-поступательного во вращательное (например, двигатели внутреннего сгорания).
Шатун - деталь кривошипно-шатунного (ползунного) механизма, передающая движение поршня или ползуна на кривошип коленчатого вала. Часть шатуна, служащая для присоединения к коленчатому валу, называется кривошипной головкой, а противоположная часть - поршневой (или ползунной) головкой.
Механизм состоит из стойки 1 ,кривошипа2, шатуна 3 и ползуна 4. Кривошип совершает непрерывное вращение, ползун - возвратно-поступательное движение, а: шатун - сложное, плоско-параллельное движение.
Полный ход ползуна получается равным удвоенной длине кривошипа. Рассматривая перемещения ползуна из одного положения в другое, нетрудно увидеть, что при повороте кривошипа на равные углы ползун проходит разное расстояние: при движении от крайнего положения к среднему участки пути ползуна увеличиваются, а при движении от среднего положения к крайнему - уменьшаются. Это свидетельствует о том, что при равномерном движении кривошипа ползун движется неравномерно. Так скорость движения ползуна меняется от нуля в начале его движения и достигает наибольшей величины, когда кривошип и шатун образуют между собой прямой угол, затем снова уменьшается до нуля при другом крайнем положении.
Неравномерность хода ползуна вызывает появление сил инерции, оказывающих отрицательное влияние на весь механизм. В этом главный недостаток кривошипно-ползунного механизма.
В некоторых кривошипно-шатунных механизмах возникает необходимость в обеспечении прямолинейности движения поршневого штока 4 . Для этого между кривошипом 1, шатуном 2 и ползуном 5 используют так называемый крейцкопф 3, воспринимающий на себя качательные движения шатуна (4 - шток промежуточный).
Эксцентриковый механизм. Подобно кривошипно-ползунному работает эксцентриковый механизм, в котором роль кривошипа выполняет эксцентрик, укрепленный на ведущем валу. Цилиндрическая поверхность экс - центрика 2 свободно охватывается хомутом 1 и бугелем 3, к которому прикреплен шатун 4, передающий во время вращения ведущего вала поступательное движение ползуну 5. В отличие от кривошипно-ползунного эксцентриковый механизм не может преобразовывать возвратно-поступательное движение ползуна во вращательное движение эксцентрика вследствие того, что между хомутом и эксцентриком, несмотря на наличие смазки, остается достаточное трение, чтобы препятствовать движению.
По этой причине эксцентриковый механизм применяют только в тех машинах, где необходимо вращательное движение преобразовывать в возвратно-поступательное движение и создавать небольшой ход исполнительному органу при значительных силах. К таким машинам относятся штампы, прессы и др.
Кривошипно-коромысловый механизм. Коромысло - звено рычажного механизма и представляет собой деталь в виде двуплечевого рычага, качающегося около средней неподвижной оси на стойке. Кривошип 1 может совершать вращательное движение. Кинематическая цепочка: криво шип 1, шатун 2 и коромысло 3, связанная шарнирными сочленениями, заставляет коромысло совершать качательные движения вокруг неподвижной оси на стойке.
Применяют кривошипно-коромысловый механизм в рессорных подвесках паровозов, вагонов, в конструкциях машин для испытания материалов, весов, буровых станков и др.
1 .4 Кулисный механизм
Кулиса 1 - звено (деталь) кулисного механизма, снабженное прямолинейной или дугообразной прорезью, в которой перемещается небольшой ползун - кулисный камень 2 . Кулисный механизм - рычажный механизм, преобразующий вращательное или карательное движения в возвратно-поступательное и наоборот. По виду движения различают кулисы: вращающиеся, качающиеся и прямолинейно движущиеся (3 - отверстие, через которое вставляется и удаляется кулисный камень).
Кривошипно-кулисный механизм. На рис. 38, I показано, что вокруг неподвижной оси вращается кривошип 3, шарнирно соединенный одним концом с ползуном (кулисным камнем) 2. При этом ползун начинает скользить (перемещаться) в продольном прямолинейном пазу, прорезанном в рычаге (кулисе) 1, и поворачивать его вокруг неподвижной оси. Длина кривошипа позволяет придать кулисе вращательное движение. Подобные механизмы служат для преобразования равномерного вращательного движения кривошипа в неравномерное вращательное движение кулисы, но если при этом длина кривошипа равна расстоянию между осями опор кривошипа и кулисы, то получается кривошипно-шатунный механизм с равномерно вращающейся кулисой.
Кривошипно-кулисный механизм с качающейся кулисой (рис. 38, II) служит для преобразования вращательного движения кривошипа 3 в качательное движение кулисы 1 и при этом происходит быстрый ход при движении ползуна в одну сторону и медленный - в другую. Механизм широко применяется в металлорежущих станках, например: в поперечно-строгальных, зубодолбежных и др.
Кривошипно-кулисный механизм с поступательно движущейся кулисой (рис. 38, III) служит для преобразования вращательного движения кривошипа 3 в прямолинейно-поступательное движение кулисы 1. В механизме кулиса может быть расположена вертикально или наклонно. Применяется такой механизм для малых длин хода и находит широкое применение в счетных машинах (синусный механизм)
1 .5 Кулачковый механизм
Кулачок - деталь кулачкового механизма с профилированной поверхностью скольжения, чтобы при своем вращательном движении передавать сопряженной детали (толкателю или штанге) движение с заданным законом изменения скорости. Геометрическая форма кулачков может быть различной: плоской, цилиндрической, конической, сферической и болеесложной.
Кулачковые механизмы - преобразующие механизмы, изменяющие характер движения, В машиностроении широко распространены кулачковые механизмы, преобразующие вращательное движение в возвратно-поступательное и возвратно-качательное. Кулачковые механизмы (рис. 39 и 40), как и другие виды механизмов, подразделяют на плоские и пространственные.
Кулачковые механизмы применяют для выполнения различных операций в системах управления рабочим циклом технологических машин, станков, двигателей и т. д. Основным элементом системы газораспределения двигателя внутреннего сгорания является простейший кулачковый механизм. Механизм состоит из кулачка 1, штанги 2, связанной с рабочим органом, и стойки, поддерживающей в пространстве звенья механизма и обеспечивающей каждому звену соответствующие степени свободы. Ролик 3, устанавливаемый в некоторых случаях на конце штанги, не влияет на закон движения звеньев механизма. Штанга, совершающая поступательное движение, называется толкателем 2, & вращательное - коромыслом 4 . При непрерывном движении кулачка толкатель совершает прерывное поступательное, а коромысло - прерывное вращательное движения.
Обязательным условием нормальной работы кулачкового механизма является постоянное касание штанги и кулачка (замыкание механизма). Замыкание механизма может быть силовым и геометрическим. В первом случае замыкание обычно обеспечивается пружиной 5 , прижимающей штангу к кулачку, во втором - конструктивным оформлением толкателя, особенно, его рабочей поверхности. К примеру, толкатель с плоской поверхностью касается кулачка разными точками, потому его применяют только в случае передачи малых усилий.
В машинах легкой промышленности для обеспечения весьма сложного взаимосвязанного движения деталей,
В машинах легкой промышленности для обеспечения весьма сложного взаимосвязанного движения деталей, наряду с простейшими плоскими, применяют пространственные кулачковые механизмы. В пространственном кулачковом механизме можно увидеть типичный пример геометрического замыкания - цилиндрический кулачок с профилем в виде паза, в который входит ролик толкателя.
При выборе типа кулачкового механизма стараются остановиться на применении плоских механизмов, имеющих значительно меньшую стоимость по сравнению с пространственными, и во всех случаях, когда это возможно, используют штангу качающейся конструкции, так как штангу (коромысло) удобно устанавливать на опоре с применением подшипников качения. Кроме того, в этом случае габаритные размеры кулачка и всего механизма в целом могут быть меньше.
Изготовление кулачковых механизмов с коническими и сферическими кулачками является сложным техническим и технологическим процессом, а потому и дорогим. Поэтому такие кулачки применяют в сложных и точных приборах.
Подобные документы
Основные характеристики, способ действия и виды механизмов преобразования вращательного движения в поступательное или наоборот: винтовой, зубчато-реечный, кулачковый, кривошипно-шатунный, кулисный, эксцентриковый, храповой, мальтийский и планетарный.
презентация , добавлен 28.12.2010
Конструкция винтового механизма, используемого для преобразования вращательного движения в поступательное. Кинематические закономерности в зубчато-реечном механизме. Принципы работы кулачкового, кривошипно-шатунного, кулисного и храпового механизмов.
презентация , добавлен 09.02.2012
Применение шарнирно-рычажных механизмов, классификация звеньев по виду движения. Кулачковые механизмы: принцип действия, наименование звеньев. Многозвенные механические передачи. Трение в винтовой паре, цапфах и пятах. Расчет подшипников качения.
контрольная работа , добавлен 25.02.2011
Виды движений, их основные характеристики и передаточные механизмы. Вращательное движение в машинах. Разновидности передач, особенности устройства, специфика работы и сфера применения в технике. Достоинства и недостатки механизмов, их назначение.
реферат , добавлен 10.11.2010
Шарнирно-рычажные механизмы применяются для преобразования вращательного или поступательного движения в любое движение с требуемыми параметрами. Фрикционные - для изменения скорости вращательного движения или преобразования вращательного в поступательное.
реферат , добавлен 15.12.2008
Назначение и классификация батанных механизмов: кривошипные и с кулачковым приводом. Технологические и технические требования к механизмам. Схема батанного механизма челночного ткацкого станка. График направления движения батана, ускорения и сил инерции.
контрольная работа , добавлен 20.08.2014
Изучение и анализ деятельности предприятия легкой промышленности - швейной фабрики "Бердчанка". Функции, состав и оборудование экспериментального цеха, особенности подготовительного производства. Организация работы раскройного и швейного цехов фабрики.
отчет по практике , добавлен 22.03.2011
Общие сведения о грузоподъемных и транспортирующих машинах, их классификация. Подъемные механизмы и домкраты, подъемники и грузоподъемные краны, манипуляторы, грузозахватные устройства, механизмы подъема и передвижения, ленточные и цепные конвейеры.
диссертация , добавлен 19.09.2010
Комплекс, производящий товары народного потребления. Общая характеристика легкой промышленности в России. Особенности планирования подготовки производства предприятий легкой промышленности. Сырьевая база, структура производственных мощностей и ресурсы.
контрольная работа , добавлен 27.04.2009
Аналог ускорений толкателя. Зубчатый и кулачковый механизмы, механизм с роликовым толкателем. Проектирование профиля кулачка. Кинетостатическое исследование плоского механизма. Расчет маховика. Определение моментов сил сопротивления. Построение графиков.
Плоский шарнирный механизм - это система, составленная из твердых звеньев, соединенных между собой подвижными шарнирами , которые позволяют звеньям поворачиваться друг относительно друга в одной плоскости. Разнообразные шарнирные механизмы повсеместно используются в технике.
Обычно их цель - преобразовать движение одних звеньев в требуемое движение других звеньев. В простейшем и, пожалуй, самом важном случае нужно преобразовать вращательное движение в возвратно-поступательное, а лучше - в прямолинейное. С такой задачей столкнулся Джеймс Ватт, работая над усовершенствованием своей паровой машины. Ему совсем прямолинейное движение не требовалось, и он нашел подходящее для себя решение. Но вопрос о том, как получить из вращательного движения строго прямолинейное, остался, и на поиск ответа ушло еще около ста лет. Вам же предлагается решить эту задачу за несколько дней.
Итак, нужно придумать шарнирный механизм из нескольких звеньев - такой, что если двигать конец какого-то одного звена по окружности, то конец другого звена будет двигаться по прямой. Ограничивать свободу движения звеньев любым другим способом, кроме шарнирных соединений, нельзя (например, нельзя использовать направляющие).
Подсказка
Неожиданным образом эта механическая задача оказывается тесно связанной с геометрией. Дело в том, что инверсия относительно данной окружности Ω с центром О переводит любую окружность, которая проходит через точку О , в прямую (разные окружности переходят в разные прямые).
Напомним, что инверсия относительно данной окружности Ω с центром О - это преобразование плоскости, при котором точке А , отличной от О , ставится в соответствие такая точка А" на луче ОА , что выполнено равенство ОА ·ОА" = R 2 , где R - радиус окружности Ω. Из этого определения сразу видно, например, что инверсия оставляет точки окружности Ω на месте. Упомянутое выше свойство менее очевидно, но при решении задачи им можно пользоваться.
Осталось создать систему из нескольких звеньев с шарнирными соединениями, в которой бы конец одного звена был инверсным образом конца другого звена. Тогда ровно по этому свойству получим, что круговое движение одной точки перейдет в прямолинейное движение другой точки.
Решение
Рассмотрим систему, показанную на рисунке 1. Она состоит из шести звеньев, два из которых имеют одну длину (ОА и ОС ), а четыре - другую (на рисунке звенья одной длины покрашены одним цветом). В такой системе точки В и D являются инверсными образами друг друга относительно некоторой окружности с центром в точке О . Покажем это.

Для начала заметим, что точки О , В и D лежат на одной прямой. В самом деле, из рисунка видно, что треугольники ОАС , ВАС и DAC - равнобедренные с общим основанием АС . Поэтому их вершины О , В и D лежат на одной и той же прямой - срединном перпендикуляре к АС .
Теперь покажем, что значение произведения ОВ·OD не зависит от положения точек в системе, а зависит только от длин звеньев. А поскольку эти длины не меняются, то это означает, что и произведение не меняется, - ровно то, что нам нужно по определению инверсии (см. подсказку).
В ромбе ABCD проведем диагонали (рис. 2). Пусть Р - точка их пересечения. Как известно, диагонали ромба перпендикулярны и делятся точкой пересечения пополам, - это нам сейчас пригодится. Обозначим x = BP = PD . Тогда
ОВ·OD = (ОР − ВР )·(ОР + PD ) = (ОР − x )·(ОР + x ) = OP 2 − x 2 .
По теореме Пифагора для треугольника ОРА : ОР 2 = ОА 2 − АР 2 , а для треугольника ВАР : АР 2 + х 2 = АР 2 + ВР 2 = АВ 2 .

Используя последние два равенства, получаем, что
ОВ·OD = OP 2 − x 2 = ОА 2 − АР 2 − x 2 = ОА 2 − (АР 2 + x 2) = ОА 2 − АВ 2 .
То есть действительно произведение ОВ·OD выражается только через постоянные в данной конструкции величины, а значит, и само это произведение не меняется. Как нетрудно догадаться, радиус окружности, относительно которой делается инверсия, равен квадратному корню из выражения в правой части последней цепочки равенств.
Осталось добавить в рассмотренную систему еще одно звено, которое бы обеспечивало движение точки В по окружности, проходящей через О , и тогда точка D будет двигаться по прямой, как видно из видео, на котором этот механизм показан в движении:
Послесловие

 Всеволод большое гнездо как правитель
Всеволод большое гнездо как правитель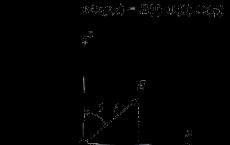 Как заполняются электронные уровни, подуровни и орбитали по мере усложнения атома
Как заполняются электронные уровни, подуровни и орбитали по мере усложнения атома Самые первые спички в мире
Самые первые спички в мире