Кинематика
Кинематика материальной точки
Определение скорости и ускорения точки по заданным уравнениям ее движения
Дано: Уравнения движения точки: x = 12 sin(πt/6)
,
см; y = 6 cos 2 (πt/6)
,
см.
Установить вид ее траектории и для момента времени t = 1 с найти положение точки на траектории, ее скорость, полное, касательное и нормальное ускорения, а также радиус кривизны траектории.
Поступательное и вращательное движение твердого тела

Дано:
t = 2 с; r 1 = 2 см, R 1 = 4 см; r 2 = 6 см, R 2 = 8 см; r 3 = 12 см, R 3 = 16 см; s 5 = t 3 - 6t (см).
Определить в момент времени t = 2 скорости точек A, C; угловое ускорение колеса 3; ускорение точки B и ускорение рейки 4.
Кинематический анализ плоского механизма

Дано:
R 1 , R 2 , L, AB, ω 1 .
Найти: ω 2 .

Плоский механизм состоит из стержней 1, 2, 3, 4 и ползуна E. Стержни соединены с помощью цилиндрических шарниров. Точка D расположена в середине стержня AB.
Дано: ω 1 , ε 1 .
Найти: скорости V A , V B , V D и V E ; угловые скорости ω 2 , ω 3 и ω 4 ; ускорение a B ; угловое ускорение ε AB звена AB; положения мгновенных центров скоростей P 2 и P 3 звеньев 2 и 3 механизма.
Определение абсолютной скорости и абсолютного ускорения точки

Прямоугольная пластина вращается вокруг неподвижной оси по закону φ = 6 t 2 - 3 t 3 . Положительное направление отсчета угла φ показано на рисунках дуговой стрелкой. Ось вращения OO 1 лежит в плоскости пластины (пластина вращается в пространстве).
По пластине вдоль прямой BD движется точка M . Задан закон ее относительного движения, т. е. зависимость s = AM = 40(t - 2 t 3) - 40 (s - в сантиметрах, t - в секундах). Расстояние b = 20 см . На рисунке точка M показана в положении, при котором s = AM > 0 (при s < 0 точка M находится по другую сторону от точки A ).
Найти абсолютную скорость и абсолютное ускорение точки M в момент времени t 1 = 1 с .
Динамика
Интегрирование дифференциальных уравнений движения материальной точки, находящейся под действием переменных сил
Груз D массой m, получив в точке A начальную скорость V 0 , движется в изогнутой трубе ABC, расположенной в вертикальной плоскости. На участке AB, длина которого l, на груз действует постоянная сила T(ее направление показано на рисунке) и сила R сопротивления среды (модуль этой силы R = μV 2 , вектор R направлен противоположно скорости V груза).
Груз, закончив движение на участке AB, в точке B трубы, не изменяя значения модуля своей скорости, переходит на участок BC. На участке BC на груз действует переменная сила F, проекция F x которой на ось x задана.
Считая груз материальной точкой, найти закон его движения на участке BC, т.е. x = f(t), где x = BD. Трением груза о трубу пренебречь.

Скачать решение задачи
Теорема об изменении кинетической энергии механической системы
Механическая система состоит из грузов 1 и 2, цилиндрического катка 3, двухступенчатых шкивов 4 и 5. Тела системы соединены нитями, намотанными на шкивы; участки нитей параллельны соответствующим плоскостям. Каток (сплошной однородный цилиндр) катится по опорной плоскости без скольжения. Радиусы ступеней шкивов 4 и 5 равны соответственно R 4 = 0,3 м, r 4 = 0,1 м, R 5 = 0,2 м, r 5 = 0,1 м. Массу каждого шкива считать равномерно распределенной по его внешнему ободу. Опорные плоскости грузов 1 и 2 шероховатые, коэффициент трения скольжения для каждого груза f = 0.1.
Под действием силы F, модуль которой изменяется по закону F = F(s), где s - перемещение точки ее приложения, система приходит в движение из состояния покоя. При движении системы на шкив 5 действуют силы сопротивления, момент которых относительно оси вращения постоянный и равен M 5 .
Определить значение угловой скорости шкива 4 в тот момент времени, когда перемещение s точки приложения силы F станет равным s 1 = 1,2 м. 
Скачать решение задачи
Применение общего уравнения динамики к исследованию движения механической системы
Для механической системы определить линейное ускорение a 1 . Считать, что у блоков и катков массы распределены по наружному радиусу. Тросы и ремни считать невесомыми и нерастяжимыми; проскальзывание отсутствует. Трением качения и трением скольжения пренебречь. 
Скачать решение задачи
Применение принципа Даламбера к определению реакций опор вращающегося тела
Вертикальный вал AK, вращающийся равномерно с угловой скоростью ω = 10 с -1 , закреплен подпятником в точке A и цилиндрическим подшипником в точке D.
К валу жестко прикреплены невесомый стержень 1 длиной l 1 = 0,3 м, на свободном конце которого расположен груз массой m 1 = 4 кг, и однородный стержень 2 длиной l 2 = 0,6 м, имеющий массу m 2 = 8 кг. Оба стержня лежат в одной вертикальной плоскости. Точки прикрепления стержней к валу, а также углы α и β указаны в таблице. Размеры AB=BD=DE=EK=b, где b = 0,4 м. Груз принять за материальную точку.
Пренебрегая массой вала, определить реакции подпятника и подшипника.

Общие теоремы динамики системы тел. Теоремы о движении центра масс, об изменении количества движения, об изменении главного момента количества движения, об изменении кинетической энергии. Принципы Даламбера, и возможных перемещений. Общее уравнение динамики. Уравнения Лагранжа.
СодержаниеРабота, которую совершает сила
, равна скалярному произведению векторов силы и бесконечно малому перемещению точки ее приложения :
,
то есть произведению модулей векторов F
и ds
на косинус угла между ними.
Работа, которую совершает момент сил
, равна скалярному произведению векторов момента и бесконечно малого угла поворота :
.
Принцип Даламбера
Суть принципа Даламбера состоит в том, чтобы задачи динамики свести к задачам статики. Для этого предполагают (или это заранее известно), что тела системы имеют определенные (угловые) ускорения. Далее вводят силы инерции и (или) моменты сил инерции, которые равны по величине и обратные по направлению силам и моментам сил, которые по законам механики создавали бы заданные ускорения или угловые ускорения
Рассмотрим пример. Путь тело совершает поступательное движение и на него действуют внешние силы . Далее мы предполагаем, что эти силы создают ускорение центра масс системы . По теореме о движении центра масс, центр масс тела имел бы такое же ускорение, если бы на тело действовала сила . Далее мы вводим силу инерции:
.
После этого задача динамики:
.
;
.
Для вращательного движения поступают аналогичным образом. Пусть тело вращается вокруг оси z
и на него действуют внешние моменты сил M e zk
.
Мы предполагаем, что эти моменты создают угловое ускорение ε z
.
Далее мы вводим момент сил инерции M И = - J z ε z
.
После этого задача динамики:
.
Превращается в задачу статики:
;
.
Принцип возможных перемещений
Принцип возможных перемещений применяется для решений задач статики. В некоторых задачах, он дает более короткое решение, чем составление уравнений равновесия. Особенно это касается систем со связями (например, системы тел, соединенные нитями и блоками), состоящих из множества тел
Принцип возможных перемещений
.
Для равновесия механической системы с идеальными связями необходимо и достаточно, чтобы сумма элементарных работ всех действующих на нее активных сил при любом возможном перемещении системы была равна нулю.
Возможное перемещение системы - это малое перемещение, при котором не нарушаются связи, наложенные на систему.
Идеальные связи - это связи, которые не совершают работы при перемещении системы. Точнее, сумма работ, совершаемая самими связями при перемещении системы равна нулю.
Общее уравнение динамики (принцип Даламбера - Лагранжа)
Принцип Даламбера - Лагранжа - это объединение принцип Даламбера с принципом возможных перемещений. То есть, при решении задачи динамики, мы вводим силы инерции и сводим задачу к задаче статики, которую решаем с помощью принципа возможных перемещений.
Принцип Даламбера - Лагранжа
.
При движении механической системы с идеальными связями в каждый момент времени сумма элементарных работ всех приложенных активных сил и всех сил инерции на любом возможном перемещении системы равна нулю:
.
Это уравнение называют общим уравнением динамики
.
Уравнения Лагранжа
Обобщенные координаты q 1 , q 2 , ..., q n - это совокупность n величин, которые однозначно определяют положение системы.
Число обобщенных координат n совпадает с числом степеней свободы системы.
Обобщенные скорости - это производные от обобщенных координат по времени t .
Обобщенные силы Q 1
, Q 2
, ..., Q n
.
Рассмотрим возможное перемещение системы, при котором координата q k
получит перемещение δq k
.
Остальные координаты остаются неизменными. Пусть δA k
- это работа, совершаемая внешними силами при таком перемещении. Тогда
δA k = Q k δq k
,
или
.
Если, при возможном перемещении системы, изменяются все координаты, то работа, совершаемая внешними силами при таком перемещении, имеет вид:
δA = Q 1
δq 1
+ Q 2
δq 2
+ ... + Q n δq n
.
Тогда обобщенные силы являются частными производными от работы по перемещениям:
.
Для потенциальных сил
с потенциалом Π
,
.
Уравнения Лагранжа
- это уравнения движения механической системы в обобщенных координатах:
Здесь T
- кинетическая энергия. Она является функцией от обобщенных координат, скоростей и, возможно, времени. Поэтому ее частная производная также является функцией от обобщенных координат, скоростей и времени. Далее нужно учесть, что координаты и скорости являются функциями от времени. Поэтому для нахождения полной производной по времени нужно применить правило дифференцирования сложной функции:
.
Использованная литература:
С. М. Тарг, Краткий курс теоретической механики, «Высшая школа», 2010.
20-е изд. - М.: 2010.- 416 с.
В книге изложены основы механики материальной точки,
системы материальных точек и твердого тела в объеме, соответствующем программам
технических вузов. Приведено много примеров и задач, решения которых
сопровождаются соответствующими методическими указаниями. Для студентов очных и
заочных технических вузов.
Формат: pdf
Размер: 14 Мб
Смотреть, скачать: drive.google
ОГЛАВЛЕНИЕ
Предисловие к тринадцатому
изданию 3
Введение 5
РАЗДЕЛ ПЕРВЫЙ СТАТИКА ТВЕРДОГО ТЕЛА
Глава I. Основные понятия исходные положения статей 9
41. Абсолютно твердое тело; сила. Задачи статики 9
12. Исходные положения статики » 11
$ 3. Связи и их реакции 15
Глава II. Сложение сил. Система сходящихся сил 18
§4. Геометрически! Способ сложения сил. Равнодействующая сходящихся сил,
разложение сил 18
f 5. Проекции силы на ось и на плоскость, Аналитический способ задания и
сложения сил 20
16. Равновесие системы сходящихся сил_ . . . 23
17. Решение задач статики. 25
Глава III. Момент силы относительно центра. Пара сил 31
i 8. Момент силы относительно центра (или точки) 31
| 9. Пара сил. Момент пары 33
f 10*. Теоремы об эквивалентности и о сложении пар 35
Глава IV. Приведение системы сил к центру. Условия равновесия... 37
f 11. Теорема о параллельном переносе силы 37
112. Приведение системы сил к данному центру - . , 38
§ 13. Условия равновесия системы сил. Теорема о моменте равнодействующей 40
Глава V. Плоская система сил 41
§ 14. Алгебраические моменты силы и пары 41
115. Приведение плоской системы сил к простейшему виду.... 44
§ 16. Равновесие плоской системы сил. Случай параллельных сил. 46
§ 17. Решение задач 48
118. Равновесие систем тел 63
§ 19*. Статически определимые н статически неопределимые системы тел
(конструкции) 56"
f 20*. Определение внутренних усилий. 57
§ 21*. Распределенные силы 58
Э22*. Расчет плоских ферм 61
Глава VI. Трение 64
! 23. Законы трения скольжения 64
: 24. Реакции шероховатых связей. Угол трения 66
: 25. Равновесие при наличии трения 66
(26*. Трение нити о цилиндрическую поверхность 69
1 27*. Трение качения 71
Глава VII. Пространственная система сил 72
§28. Момент силы относительно оси. Вычисление главного вектора
и главного момента системы сил 72
§ 29*. Приведение пространственной системы сил к простейшему виду 77
§30. Равновесие произвольной пространственной системы сил. Случай параллельных
сил
Глава VIII. Центр тяжести 86
§31. Центр параллельных сил 86
§ 32. Силовое поле. Центр тяжести твердого тела 88
§ 33. Координаты центров тяжести однородных тел 89
§ 34. Способы определения координат центров тяжести тел. 90
§ 35. Центры тяжести некоторых однородных тел 93
РАЗДЕЛ ВТОРОЙ КИНЕМАТИКА ТОЧКИ И ТВЕРДОГО ТЕЛА
Глава IX. Кинематика точки 95
§ 36. Введение в кинематику 95
§ 37. Способы задания движения точки. . 96
§38. Вектор скорости точки,. 99
§ 39. Вектор "ткорения точки 100
§40. Определение скорости и ускорения точки при координатном способе задания
движения 102
§41. Решение задач кинематики точки 103
§ 42. Оси естественного трехгранника. Числовое значение скорости 107
§ 43. Касательное и нормальное ускорения точки 108
§44. Некоторые частные случаи движения точки ПО
§45. Графики движения, скорости и ускорения точки 112
§ 46. Решение задач < 114
§47*. Скорость и ускорение точки в полярных координатах 116
Глава X. Поступательное и вращательное движения твердого тела. . 117
§48. Поступательное движение 117
§ 49. Вращательное движение твердого тела вокруг оси. Угловая скорость и угловое
ускорение 119
§50. Равномерное и равнопеременное вращения 121
§51. Скорости и ускорения точек вращающегося тела 122
Глава XI. Плоскопараллельное движение твердого тела 127
§52. Уравнения плоскопараллельного движения (движения плоской фигуры).
Разложение движения на поступательное и вращательное 127
§53*. Определение траекторий точек плоской фигуры 129
§54. Определение скоростей точек плоской фигуры 130
§ 55. Теорема о проекциях скоростей двух точек тела 131
§ 56. Определение скоростей точек плоской фигуры с помощью мгновенного центра
скоростей. Понятие о центроидах 132
§57. Решение задач 136
§58*. Определение ускорений точек плоской фигуры 140
§59*. Мгновенный центр ускорений "*«*
Глава XII*. Движение твердого тела вокруг неподвижной точки и движение
свободного твердого тела 147
§ 60. Движение твердого тела, имеющего одну неподвижную точку. 147
§61. Кинематические уравнения Эйлера 149
§62. Скорости и ускорения точек тела 150
§ 63. Общий случай движения свободного твердого тела 153
Глава XIII. Сложное движение точки 155
§ 64. Относительное, переносное и абсолютное движения 155
§ 65, Теорема о сложении скоростей » 156
§66. Теорема о сложении ускорений (теорема Кориолнса) 160
§67. Решение задач 16*
Глава XIV*. Сложное движение твердого тела 169
§68. Сложение поступательных движений 169
§69. Сложение вращений вокруг двух параллельных осей 169
§70. Цилиндрические зубчатые передачи 172
§ 71. Сложение вращений вокруг пересекающихся осей 174
§72. Сложение поступательного и вращательного движений. Винтовое движение 176
РАЗДЕЛ ТРЕТИЙ ДИНАМИКА ТОЧКИ
Глава XV: Введение в динамику. Законы динамики 180
§ 73. Основные понятия и определения 180
§ 74. Законы динамики. Задачи динамики материальной точки 181
§ 75. Системы единиц 183
§76. Основные виды сил 184
Глава XVI. Дифференциальные уравнения движения точки. Решение задач динамики
точки 186
§ 77. Дифференциальные уравнения, движения материальной точки №6
§ 78. Решение первой задачи динамики (определение сил по заданному движению) 187
§ 79. Решение основной задачи динамики при прямолинейном движении точки 189
§ 80. Примеры решения задач 191
§81*. Падение тела в сопротивляющейся среде (в воздухе) 196
§82. Решение основной задачи динамики, при криволинейном движении точки 197
Глава XVII. Общие теоремы динамики точки 201
§83. Количество движения точки. Импульс силы 201
§ S4. Теорема об изменении количества движения точки 202
§ 85. Теорема об изменении момента количества движения точки (теорема моментов)
" 204
§86*. Движение под действием центральной силы. Закон площадей.. 266
§ 8-7. Работа силы. Мощность 208
§88. Примеры вычисления работы 210
§89. Теорема об изменении кинетической энергии точки. ". . . 213J
Глава XVIII. Несвободное и относительнее движения точки 219
§90. Несвободное движение точки. 219
§91. Относительнбе движение точки 223
§ 92. Влияние вращения Земли на равновесие и движение тел... 227
§ 93*. Отклонение падающей точки от вертикали вследствие вращения Земли " 230
Глава XIX. Прямолинейные колебания точки. . . 232
§ 94. Свободные колебания без учета сил сопротивления 232
§ 95. Свободные колебания при вязком сопротивлении (затухающие колебания) 238
§96. Вынужденные колебания. Резонаяс 241
Глава XX*. Движение тела в поле земного тяготения 250
§ 97. Движение брошенного тела в поле тяготения Земли " 250
§98. Искусственные спутники Земли. Эллиптические траектории. 254
§ 99. Понятие о невесомости."Местные системы отсчета 257
РАЗДЕЛ ЧЕТВЕРТЫЙ ДИНАМИКА СИСТЕМЫ И ТВЕРДОГО ТЕЛА
Г я а в а XXI. Введение в динамику системы. Моменты инерции. 263
§ 100. Механическая система. Силы внешние ж внутренние 263
§ 101. Масса системы. Центр масс 264
§ 102. Момент инерции тела относительно оси. Радиус инерции. . 265
$ 103. Моменты инерции тела относительно параллельных осей. Теорема Гюйгенса 268
§ 104*. Центробежные моменты инерции. Понятия о главных осях инерции тела 269
$ 105*. Момент инерции тела относительно произвольной оси. 271
Глава XXII. Теорема о движении центра масс системы 273
$ 106. Дифференциальные уравнения движения системы 273
§ 107. Теорема о движении центра масс 274
$ 108. Закон сохранения движения центра масс 276
§ 109. Решение задач 277
Глава XXIII. Теорема об изменении количества движимая системы. . 280
$ НО. Количество движения системы 280
§111. Теорема об изменении количества движения 281
§ 112. Закон сохранения количества движения 282
$ 113*. Приложение теоремы к движению жидкости (газа) 284
§ 114*. Тело переменной массы. Движение ракеты 287
Гдава XXIV. Теорема об изменении момента количеств движения системы 290
§ 115. Главный момент количеств движения системы 290
$ 116. Теорема об изменения главного момента количеств движения системы (теорема
моментов) 292
$117. Закон сохранения главного момента количеств движения. . 294
$ 118. Решение задач 295
$ 119*. Приложение теоремы моментов к движению жидкости (газа) 298
§ 120. Условия равновесия механической системы 300
Глава XXV. Теорема об изменении кинетической энергии системы. . 301.
§ 121. Кинетическая энергия системы 301
$122. Некоторые случаи вычисления работы 305
$ 123. Теорема об изменении кинетической энергии системы 307
$ 124. Решение задач 310
$ 125*. Смешанные задачи "314
$ 126. Потенциальное силовое поле и силовая функция 317
$ 127, Потенциальная энергия. Закон сохранения механической энергии 320
Глава XXVI. "Приложение общих теорем к динамике твердого тела 323
$ 12&. Вращательное движение твердого тела вокруг неподвижной оси ". 323"
$ 129. Физический маятник. Экспериментальное определение моментов инерции. 326
$130. Плоскопаралдедыюе движение твердого тела 328
$ 131*. Элементарная теория гироскопа 334
$ 132*. Движение твердого тела вокруг неподвижной точки и движение свободного
твердого тела 340
Глава XXVII. Принцип Даламбера 344
$ 133. Принцип Даламбера для точки и механической системы. . 344
$ 134. Главный вектор и главный момент сил инерции 346
$ 135. Решение задач 348
$136*, Дидемяческне реакции, действующие на ось вращающегося тела.
Уравновешшвяпне вращающихся тел 352
Глава XXVIII. Принцип возможных перемещений и общее уравнение динамики 357
§ 137. Классификация связей 357
§ 138. Возможные перемещения системы. Число степеней свободы. . 358
§ 139. Принцип возможных перемещений 360
§ 140. Решение задач 362
§ 141. Общее уравнение динамики 367
Глава XXIX. Условия равновесия и уравнения движения системы в обобщенных
координатах 369
§ 142. Обобщенные координаты и обобщенные скорости. . . 369
§ 143. Обобщенные силы 371
§ 144. Условия равновесия системы в обобщенных координатах 375
§ 145. Уравнения Лагранжа 376
§ 146. Решение задач 379
Глава XXX*. Малые колебания системы около положения устойчивого равновесия
387
§ 147. Понятие об устойчивости равновесия 387
§ 148. Малые свободные колебания системы с одной степенью свободы 389
§ 149. Малые затухающие и вынужденные колебания системы с одной степенью свободы
392
§ 150. Малые сводные колебания системы с двумя степенями свободы 394
Глава XXXI. Элементарная теория удара 396
§ 151. Основное уравнение теории удара 396
§ 152. Общие теоремы теории удара 397
§ 153. Коэффициент восстановления при ударе 399
§ 154. Удар тела о неподвижную преграду 400
§ 155. Прямой центральный удар двух тел (удар шаров) 401
§ 156. Потеря кинетической энергии при неупругом ударе двух тел. Теорема Карно
403
§ 157*. Удар по вращающемуся телу. Центр удара 405
Предметный указатель 409
 Всеволод большое гнездо как правитель
Всеволод большое гнездо как правитель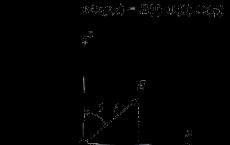 Как заполняются электронные уровни, подуровни и орбитали по мере усложнения атома
Как заполняются электронные уровни, подуровни и орбитали по мере усложнения атома Самые первые спички в мире
Самые первые спички в мире